Custom and DIY hardware logging
This page contains an example of how data logging can be implemented and existing projects you can build and/or adapt.
Existing DIY options
esplog by VladimirP1
A ESP32-based motion data logger with wireless control and data transfer. Available as a small breakout board version or a tiny single PCB version. The developer and testers of esplog can be found on the Gyroflow discord.
Flowshutter and Flowbox by Dusking1
These are motion data loggers developed by Dusking1 using the Betaflight firmware. The Flowshutter is designed to be capable of triggering a variety of cameras for a one-click operation.
Hardware
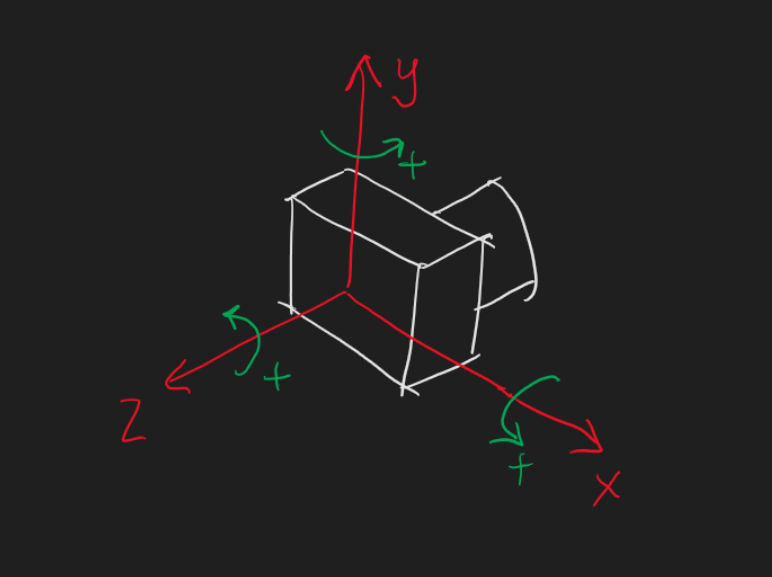
An MEMS Inertial Measurement Unit (MEMS IMU) is a chip containing a gyroscope and an accelerometer. The gyroscope measures the rotational rate, while the accelerometer measures acceleration as the name implies. Gyroflow requires the gyroscope, while the accelerometer is optional and only required if horizon referencing is desired. An example of the acceleration and rotational axes around a camera is illustrated above. Many camera systems already contain such an IMU for electronic image stabilization, so in some cases, it is possible to allow for motion logging through a firmware update.
For a dedicated logger, a simple combination of a memory device (MicroSD/SPI Flash chip etc.), a microcontroller, and an inertial measurement unit suffices. This hardware combination is readily available as low-cost drone flight controllers, which can act as loggers as described on another page.
For arduino and embedded electronics hobbyists, this is a fairly basic project that can be built on a breadboard/perfboard
Software/Firmware
On the software and firmware side, the inertial measurement unit should be configured correctly. Refer to the datasheet of your IMU for information about how to configure this exactly. It has been found that the following IMU settings offer a reasonable starting point.
- logging rate: 500 Hz
- Low pass filter cutoff: 50 to 100 Hz
- gyro scaling: 1000 deg/s
- acceleration scaling: +/- 8 g
The minimum logging rate sufficient for stabilization is approximately 100 Hz, but note that such a low logging rate requires excellent filtering in order to avoid data loss and aliasing. Using a 500 Hz logging rate with a 100 Hz cutoff allows for some margin of error in terms of aliasing.
Logging
Logging of Gyroscope, and optionally, Accelerometer and Magnetometer can be in various formats. The .gcsv log format described here is a simple to implement format suitable for basic motion loggers.